

مقدمه
موتورهای القایی آسنکرون AC، ((موتورهای آسنکرون به موتورهایی اطلاق میشود که سرعت حرکت روتور آن با سرعت میدان مغناطیسی استاتور آن برابر نیست.)) ، بیشترین کاربرد در ماشین های صنعتی و همچنین در کاربرد های خانگی دارند. در برخی شرایط نیاز داریم تا سرعت این الکتروموتور ها را برای رسیدن به خواسته خود در صنعت و یا کاربرد خانگی کنترل کنیم. بنابراین کنترل سرعت این موتور ها به عنوان یک نیاز احساس شد. روش های کنترلی متفاوتی برای کنترل سرعت این موتور ها بوجود آمدند که هرکدام ویژگیهای خاص خود را دارند.
روشهای کنترل سرعت الکتروموتور
در ادامه برخی از روش های کنترل سرعت در الکتروموتور های القایی AC آسنکرون را بررسی خواهیم کرد.
-
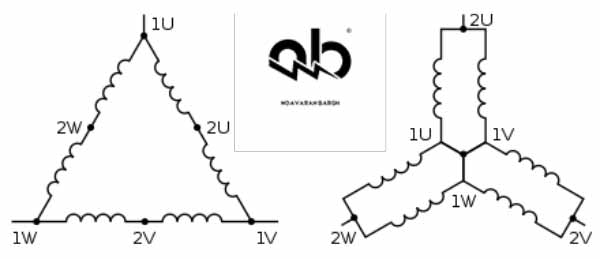
تغییر دادن تعداد قطب ها
روش تغيير دادن قطب ها روش بسيار قديمي كنترل سرعت است كه در سال 1897 ارائه شده است . این روش بر اين اصل استوار است كه سرعت الکتروموتور را با تغییر نسبت2/1 در قطب های سیستم میتوان تغییر داد . نكته قابل توجه اين است كه اين روش فقط در موتورهاي قفسه اي قابل اجرا مي باشد زيرا فقط در موتور هاي قفسه اي مي توان هر تعداد منطقي از قطبهاي استاتور را قرار داد.در شکل زیر نحوه کارکرد این روش را نشان داده شده است.
این روش دارای مزایا و معایبی است که عبارتاند از:
-
مزایا : عدم نیاز به مدار های پیچیده و قدرتی و الکترونیکی
-
معایب: بالا بودن قیمت این الکتروموتور ها
-
-
تغییر دادن مقدار S
به طور کلی مقدار S را به دو صورت میتوان تغییر داد که عبارتاند از:
-
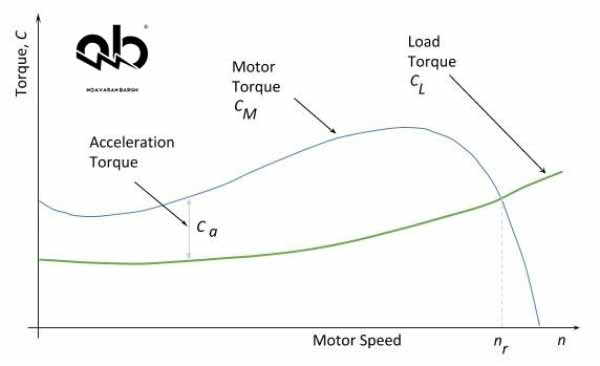
تغییر دادن ولتاژ اعمالی به استاتور
گشتاور توليد شده توسط يك موتور القائي با مربع ولتاژ وارده متناسب است.
-
تغییر دادن مقاومت روتور
اين روش بر روی موتور هایي با روتور اسليپ رينگي قابل اعمال میباشد. در اين موتورها تغيير شكل منحني گشتاور سرعت با قراردادن مقاومت اضافي در مدار روتور ماشين امكان پذير است.
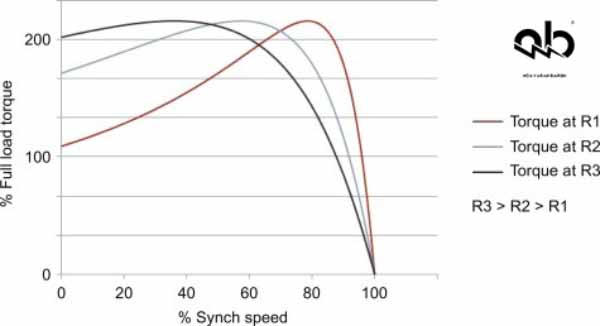
با توجه به شکل میتوان ملاحظه کرد که با داشتن مقاومت های متفاوت، سرعت های مختلفی را خواهیم داشت.
مزایا و معایب این روش عبارتانداز:
- مزایا: با استفاده از این روش میتوان گشتاور راه اندزي را بالا برد.
- معایب: با افزایش مقاومت موتور، تلفات موتور (RI2) نيز افزايش پیدا میکند و در نتیجه بهره كار موتور كاهش خواهد يافت در حقيقت تلفات مستقيما با كاهش سرعت متناسب میباشد.
-
-
تغییر دادن فرکانس
با تغییر فرکانس شبکه یک الکتروموتور، سرعت چرخش میدان مغناطیسی آن نیز تغییر پیدا میکند و به همین ترتیب سرعت چرخش موتور نیز به همین طبع تغییر خواهد کرد.
حال میخواهیم به تفصیل به بررسی این روش در غالب اینورتر ها بپردازیم.
بیشتر بخوانید:راه اندازی الکتروموتورهای القایی در صنعت
اینورتر
یکی از قسمت های پر اهمیت و پر استفاده درایو ها، بخش اینورتر میباشد.
درشکل زیر نمونه یک دستگاه اینورتر را مشاهده میفرمایید:

به زبان ساده اینورتر مبدلی است که جریان مستقیم (DC) را به جریان متناوب (AC) تبدیل میکند. در اصل عملکرد اینورتر برعکس یکسو کننده ها میباشد.
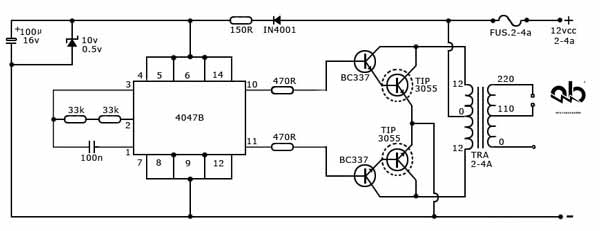
مدار داخلی یک اینورتر به صورت شکل زیر میباشد.
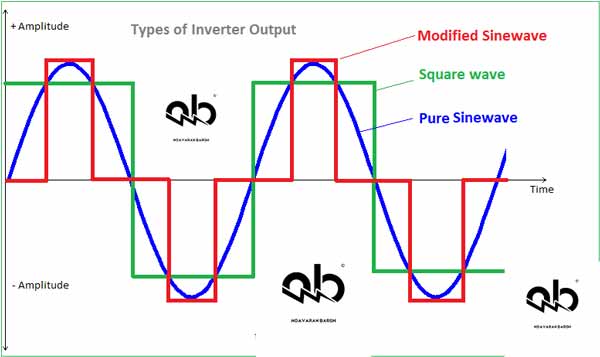
نکته مهم این است که خروجی اینورتر ها را میتوان توسط تقویت کننده ها به سطح ولتاژ و فرکانس دلخواه تغییر داد که از این خاصیت میتوان در کنترل دور الکتروموترو ها استفاده کرد. همچنین خروجی اینورتر ها به صورت موج مربعی میباشد که به همین دلیل هارمونیک شبکه را دچار مشکل میکند.
شکل زیر شکل موج خروجی اینورتر را نمایش میدهد.
حتما ببینید :اتوماسیون صنعتی و هوشمند سازی
از معایب اینورتر ها همانطور که اشاره شد میتوان به ایجاد هارمونیک در شبکه اشاره کرد که در اگر از درصدی فراتر رود باعث آسیب به سیستم های دیگر در یک تابلو کنترل میشود. بدین منظور فیلتر هایی برای کاهش درصد هارمونیک تولیدی توسط اینورتر در نظر گرفته شده است.
یکی از مواردی که از اینورتر ها در آن استفاده میشود، سیستم های پنلهای خورشیدی و انرژی های تجدیدپذیر است، زیرا که خروجی این سیستم ها به صورت DC بوده و از این اینورتر ها برای تبدیل خروجی DC به برق متناوب AC استفاده میشود.
درایو ها از قطعات الکترونیکی مختلف مانند تریستورها و IGBT ها و .... تشکیل شدهاند.
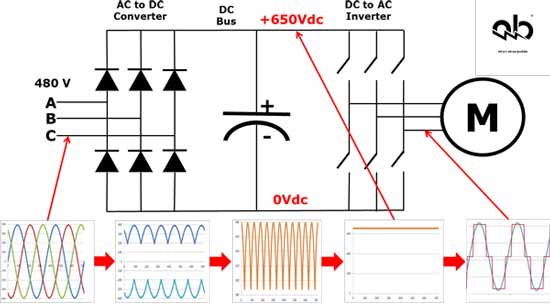
شکل فوق نشان دهنده اتصالات و بخش های مختلف یک درایو است.
همانطور که در شکل بالا مشخص است ابتدا برق شبکه توسط دیود ها (یکسو کننده ها) به برق DC تبدیل شده است. سپس جریان مستقیم تولید شده DC توسط مبدل موجود در اینورتر به جریان متناوب AC تبدیل میشود. جریان متناوبی که در این بخش تولید شده است میتواند به صورت ولتاژ و فرکانس متغییر باشد و با توجه به خواسته کنترلی اپراتور تغییر کند.
همانطور که در بخش های قبل نیز توضیح داده شد شکل موج خروجی اینورتر بصورت مربعی بوده که این امر به دلیل سوئیچینگ قطعه الکترونیکی IGBT اتفاق میافتد که باعث به وجود آمدن هارمونیک در شبکه می گردد و برای برطرف کردن این مشکل از فیلتر های مخصوصی در داخل درایو استفاده میشود.
اما استفاده از اینورتر در صنعت مزایایی را نیز با خود به همراه دارد که عبارتاند از:
- راه اندازی بسیار ساده موتور
- صرفه جویی در مصرف برق و بازگشت سرمایه بعد از مدتی کوتاه
- استفاده از جریان راه اندازی کمتر نسبت به روش های راه اندازی دیگر مانند کنتاکتوری
- توانایی کنترل سرعت و گشتاور موتور با استفاده از درایو
- کاهش تنش های الکتریکی (به دلیل راهاندازی و توقف نرم) و در پی آن کاهش تنش های مکانیکی و این خود باعث کاهش هزینههای تعمیر و نگهداری میشود.
- در اختیار داشتن امکانات نرم افزاری برای کنترل عملکردی دور موتور
- بالا رفتن عمر کاری موتور به دلیل مزیت های ذکر شده بالا
امروزه و با پیشرفت روز افزون در صنعت اکثر کارخانجات صنعتی برای راه اندازی الکتروموتور ها از درایو استفاده میکنند. از جمله کاربرد های درایو در صنعت میتوان به ماشین آلات بسته بندی، ماشین آلات CNC، آسانسور ها، دستگاه های تزریق پلاستیک و.... اشاره کرد.


تصاویر فوق تنها بخشی از کاربرد گسترده درایو ها در صنعت میباشد.
برخی از معروف ترین برندهای فعال در زمینه تولید درایو ها عبارت اند از:
- Siemens
- ABB
- Liteon
- Delta
- LS
- Kinko
- Mitsubishi
مقاومت ترمز
گاهی بر اساس استفاده ای که از سیستم در محیط صنعتی داریم لازم است تا الکتروموتور در مدت زمان کوتاهی موقف شود. در این صورت اگر موتور به صورت Full load در حال کار باشد در این مدت زمان کوتاه برای متوقف شدن، موتور حالتی مانند ژنراتور پیدا میکند یعنی تولید جریان و ولتاژ میکند، این ولتاژ و جریان تولیدی باعث افزایش جریان Bus DC در درایو میشود که در این حالت درایو دچار خطا میشود و در طولانی مدت ممکن است که باعث آسیب دیدن IGBT های درایو شود. برای جلوگیری از بروز چنین اتفاقی باید جریان و ولتاژ تولیدی توسط درایو تخلیه شود که برای انجام این کار از مقاومت ترمز که برای این کار در نظر گرفته شده است استفاده میشود. توسط مقاومت ترمز، جریان و ولتاژ تولیدی اضافه، توسط این مقاومت به صورت گرما تلف میشود و از آسیب رسیدن به درایو جلوگیری میشود.
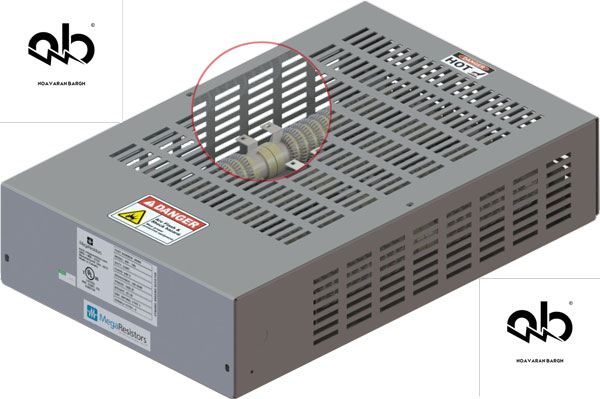

تصاویر بالا نمونه هایی از مقاومت ترمز میباشند. مقاومت ترمز ها توسط یک واحد ترمز(brake unit) به درایو متصل میشوند. این واحد ترمز، گاهی اوقات درون درایو قرار داده میشود و یا اینکه باید آن را به صورت جدگانه برای استفاده، تهیه نمود.
مدهای کاری اینورتر
دو مد کاری پرکاربرد در اینورتر ها به شرح زیر میباشند:
-
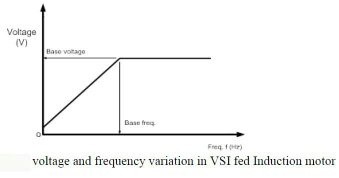
V/F
ساده ترین مد راه اندازی موتور میباشد که با تغییر ولتاژ و فرکانس، سرعت موتور را تغییر میدهد. در این حالت ولتاژ و فرکانس دارای رابطه خطی میباشند.
-
Sensorless Vector
نوع دیگری از مد کنترلی دور موتور میباشد که نسبت به مد V/F در کنترل سرعت و گشتاور موتور عملکرد بسیار بهتری دارد به این ترتیب که اینورتر از هر فاز فیدبک گرفته و سپس خروجی موتور را با هدف تطبیق میدهد و خروجی اینورتر را برای رسیدن به هدف طراحی شده تغییر میدهد.
در این مقاله سعی کردیم تا حدامکان به صورت ساده و کاربردی توضیحاتی خدمت شما عزیزان ارائه کرده باشیم، امیدواریم که مورد تایید و توجه شما قرار گرفته باشد.






سلطانی
باسلام ایا میتوان توسط اینورتر دور یک موتور القایی را ثابت نگه داشت ولی ولتاژ ان را کاهش داد؟؟تا بدین وسیله گشتاور کاهش یابد و جریان مصرفی کاهش پیدا کند؟
پاسخ